







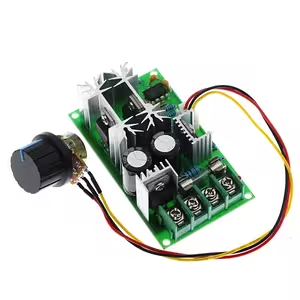
Integrated Stepper Motor Controller and Driver for Nema17/Nema23 – Standalone Operation, No Coding Required
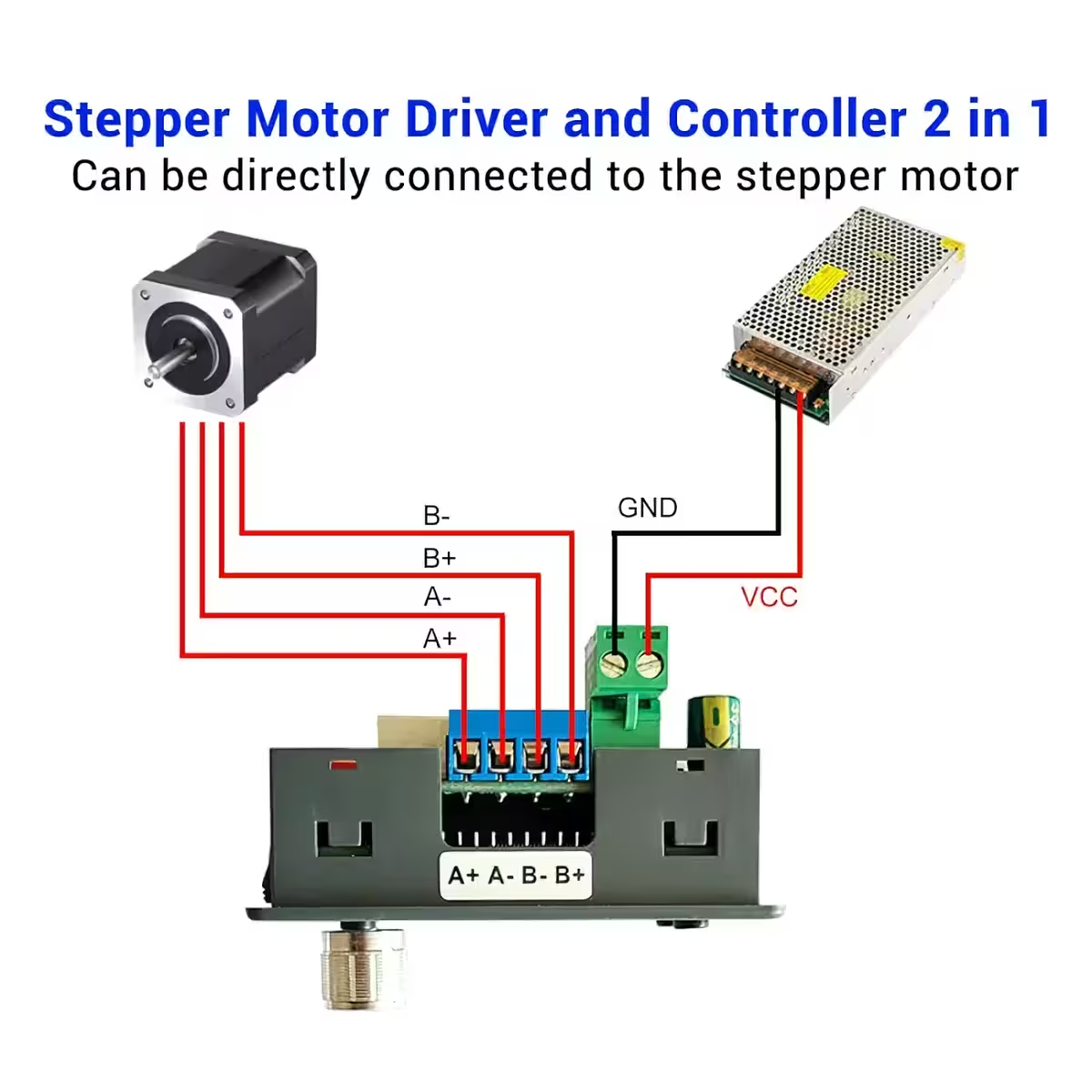
Need to control a stepper motor without the hassle of writing code, using an Arduino, or relying on a PC? This integrated stepper motor controller and driver is the perfect solution. Simply configure your settings using the built-in potentiometer and buttons, start your motor, and you’re ready to go. This compact, all-in-one unit replaces two separate components, significantly reducing wiring complexity.
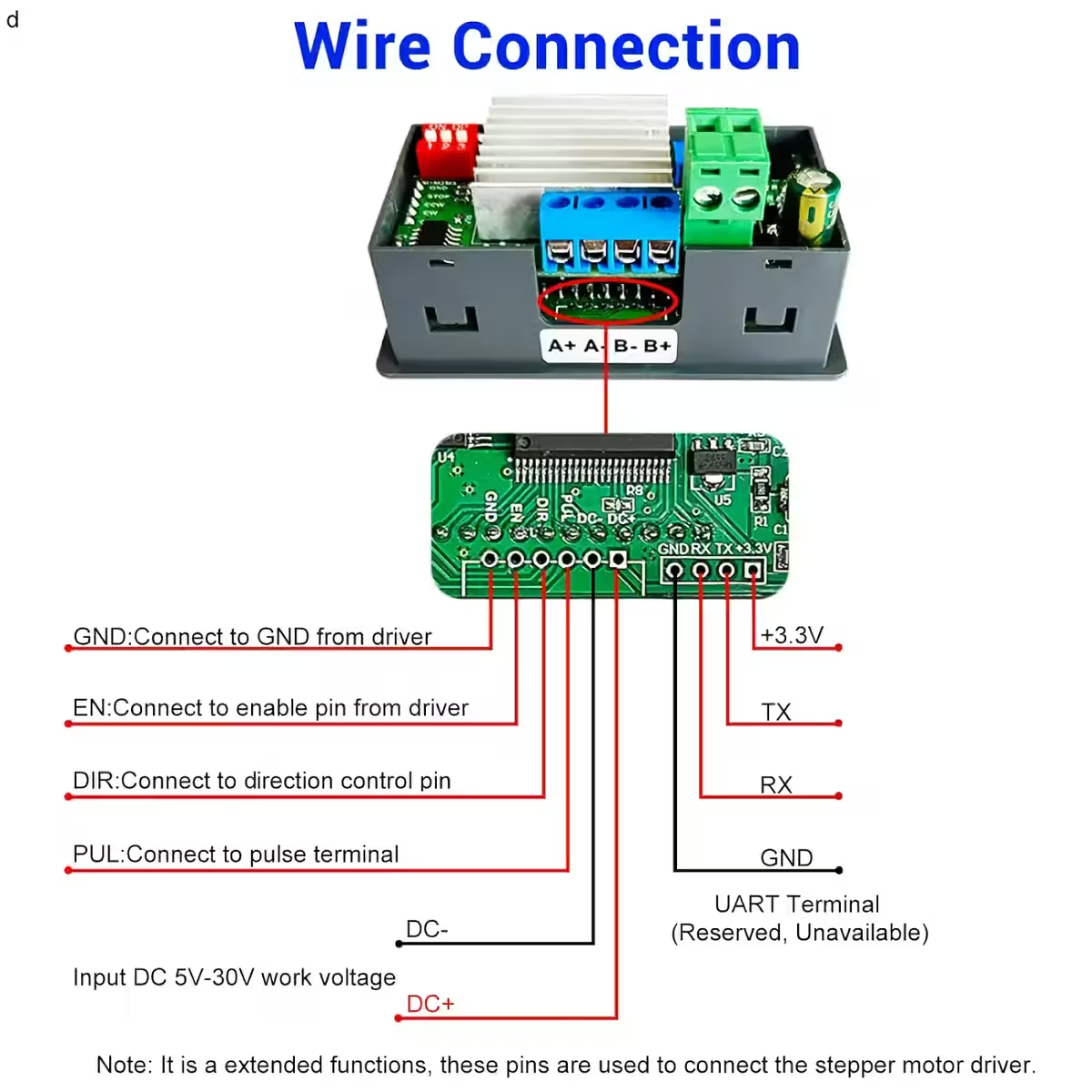
Note: This module controls a single axis. It is compatible with 2-phase stepper motors featuring 4, 5, 6, or 8 wires. It can operate as a standalone unit or be connected to external stepper drivers or a PLC.
Why choose this controller? (Key Advantages):
- Zero external dependencies — No need for Arduino, Raspberry Pi, or Python; configure everything directly on the module in under 5 minutes.
- 9 pre-configured working programmes — From simple rotation to complex sequences with automatic reversal, delays, and infinite loops, all without additional programming.
- HD LCD with memory — Displays RPM, cycles, and delays in real-time; your configuration is saved even after power is disconnected.
- Smooth start and stop — Adjustable acceleration and deceleration (100 levels) to prevent mechanical shock and extend the life of your gears.
- 4A output current — Powerful enough to drive Nema 23 motors under medium loads without needing an external driver.
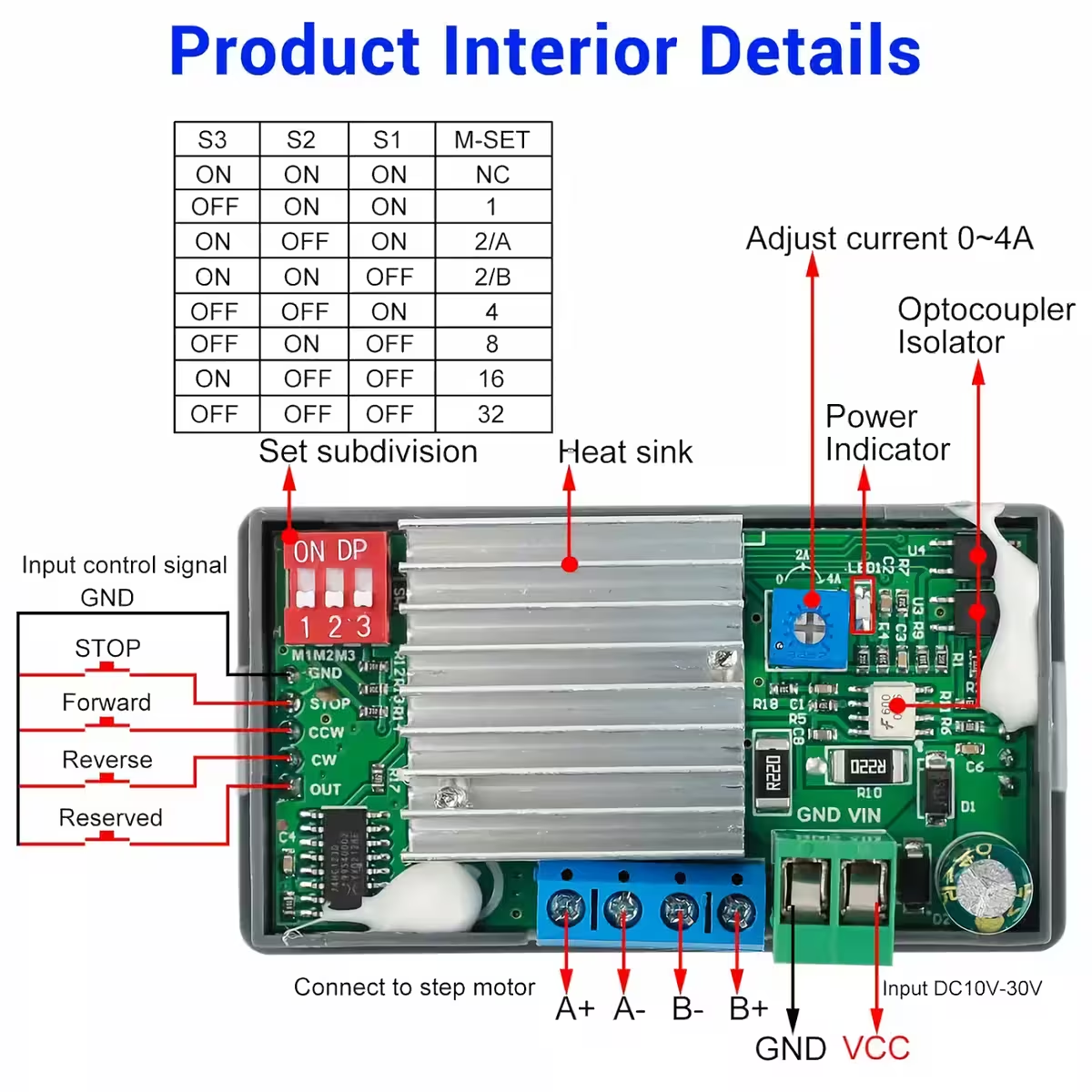
- Microstepping up to 1/32 — Adaptable positioning precision for everything from rapid movements to ultra-fine adjustments.
- Reverse polarity protection — Built-in protection ensures the module isn’t damaged by incorrect wiring during installation.
- Wide operating temperature range — Designed to perform reliably between –20°C and +85°C, making it suitable for industrial warehouses, unheated workshops, or high-humidity environments.
Performance and Specifications
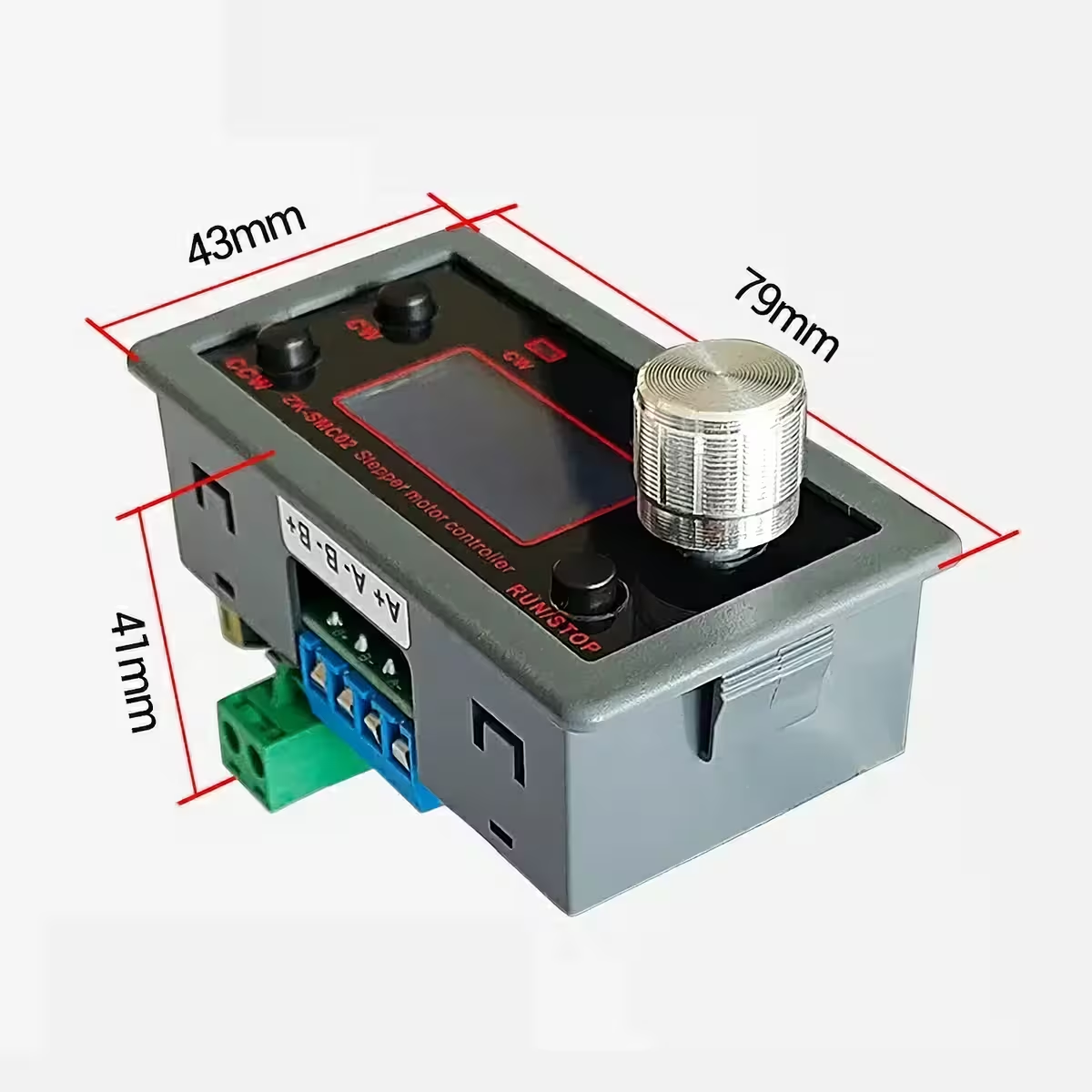
The logic controller and power driver are housed in a single 79 × 43 × 41 mm unit, eliminating the need for separate components and messy cabling. Speed is continuously adjustable between 0.1 and 999 RPM via the potentiometer or parameters F-03/F-05, while the number of pulses per cycle can be set up to 9,999,999. Parameter F-09 allows for precise calibration of pulses per rotation based on the step angle and chosen microstepping — for example, a 1.8° motor with 1/8 microstepping generates 1600 pulses/rotation, so you would set F-09 = 160.
| Parameter | Value / Detail |
|---|---|
| Input Voltage | DC 5V – 30V |
| Max Output Current | 4A |
| Compatible Motors | Nema 17 (42mm), Nema 23 (57mm) – 2-phase, 4/5/6/8 wires |
| Controlled Axes | 1 (Single axis) |
| Rotation Speed | 0.1 – 999 RPM |
| Forward / Reverse Pulses | 1 – 9,999,999 |
| Number of Cycles | 1 – 9,999 or infinite loop |
| Forward / Reverse Delay | 0.0 – 999.9 seconds (±0.2s) |
| Microstepping | 1 / 2 / 4 / 8 / 16 / 32 |
| Working Programmes (P01–P09) | 9 configurable modes |
| Acceleration / Deceleration Control | Yes (F-12: levels 1–100) |
| Reverse Polarity Protection | Yes |
| Operating Modes | Automatic / Manual / Configuration |
| Display | HD LCD (RPM, cycles, delay) |
| Operating Temperature | –20°C to +85°C |
| Operating Humidity | 5% – 95% RH |
| Module Dimensions | 79 × 43 × 41 mm |
Programming and Usage Instructions
Running Interface (Normal Mode):
- The first LCD line displays rotation speed in RPM; the second line displays the delay or cycle count (configurable via F-10).
- The CW button starts clockwise rotation; the CCW button starts counter-clockwise rotation.
- The RUN/STOP button starts or stops the motor (smooth or immediate stop, depending on F-11).
- The potentiometer adjusts speed in real-time for both directions.
Accessing the Parameter Menu (F-01 – F-13):
- Press and hold the potentiometer for more than 3 seconds to enter settings mode.
- Rotate the potentiometer to navigate between parameters F-01 → F-13; the selected parameter will flash on the screen.
- Press the potentiometer to select the parameter value and rotate to modify it.
- Press RUN/STOP to confirm the entered value.
- Press and hold the potentiometer for more than 3 seconds to save and exit the menu.
Parameter Table F-01 – F-13:
| Parameter | Function | Setting Range | Default Value |
|---|---|---|---|
| F-01 | Working mode selection (P01–P09) | P01 – P09 | P01 |
| F-02 | Forward direction pulse count | 1 – 9,999,999 | 1600 |
| F-03 | Forward rotation speed (RPM) | 0.1 – 999.9 | 10 |
| F-04 | Reverse direction pulse count | 1 – 9,999,999 | 1600 |
| F-05 | Reverse rotation speed (RPM) | 0.1 – 999.9 | 10 |
| F-06 | Number of cycles (‘—-‘ = infinite loop) | 0 – 9,999 / ∞ | 1 |
| F-07 | Delay after forward movement (seconds) | 0.0 – 999.9 | 0 |
| F-08 | Delay after reverse movement (seconds) | 0.0 – 999.9 | 0 |
| F-09 | Pulses per full rotation (unit = 10; e.g., 1.8° × 8 microstepping → 1600 pulses → set 160) | 1 – 9,999 | 160 |
| F-10 | LCD display config: 0 = line 2 shows delay; 1 = line 2 shows cycle count | 0 or 1 | 0 |
| F-11 | RUN/STOP behaviour: 0 = slow deceleration; 1 = immediate stop | 0 or 1 | 0 |
| F-12 | Acceleration/deceleration level: 1 = slowest, 100 = fastest | 1 – 100 | 20 |
| F-13 | Device address (for multi-driver networks) | 1 – 255 | 1 |
Working Modes P01 – P09 (F-01):
| Mode | Behaviour Description |
|---|---|
| P01 | Motor responds exclusively to the potentiometer: clockwise = CW, counter-clockwise = CCW. Buttons are inactive. |
| P02 | Rotation according to F-02/F-04 pulses; stop after each set; reset with potentiometer; loop according to F-06. |
| P03 | Alternating rotation and stop according to F-02/F-04 pulses. Stop the motor before changing direction. |
| P04 | Sequence: F-02 → stop F-07 → loop F-06 times (forward); F-04 → stop F-08 → loop (reverse). |
| P05 | Rotation F-02/F-04 → stop → return in opposite direction → loop F-06 times. |
| P06 | Full sequence: F-02 → stop F-07 → reverse F-04 → stop F-08 → loop F-06 times. |
| P07 | Rotation F-02/F-04 → stop → return to origin in opposite direction (no fixed cycle count). |
| P08 | Time-based rotation: F-07 → stop F-08 → loop F-06 times. |
| P09 | Full sequence: forward rotation F-02 → stop F-07 → reverse rotation F-04 → stop F-08 → loop F-06 times. |
Package Contents
- 1 × Integrated Stepper Motor Controller/Driver (Nema17/Nema23)
- 1 × Motor connection cable
Frequently Asked Questions
Is it compatible with Nema 17 and Nema 23 stepper motors?
Yes. It works with 2-phase stepper motors of the Nema 17 (42mm) and Nema 23 (57mm) type, regardless of whether they have 4, 5, 6, or 8 wires.
Do I need an Arduino or other microcontroller?
No. The module operates completely autonomously — you configure everything using the potentiometer and buttons. It can optionally be connected to a PLC or external driver, but this is not required.
Can I control multiple axes simultaneously with one module?
No, it controls a single axis. For multiple axes, you will need one module for each motor.
How do I calculate the correct value for F-09?
Formula: (360 ÷ step_angle) × microstepping ÷ 10. Example: 1.8° motor with 1/8 microstepping → (360 ÷ 1.8) × 8 ÷ 10 = 160. Set F-09 = 160.
Product Video
Photo Gallery










Reviews
There are no reviews yet.